
Experiment
CE106
BALL AND BEAM APPARATUS
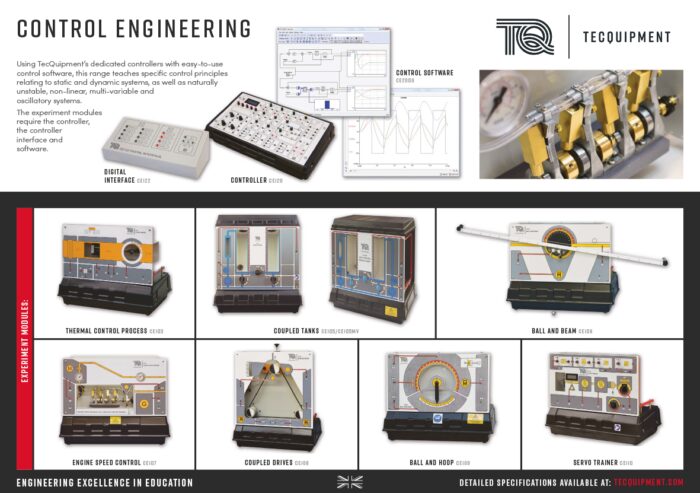
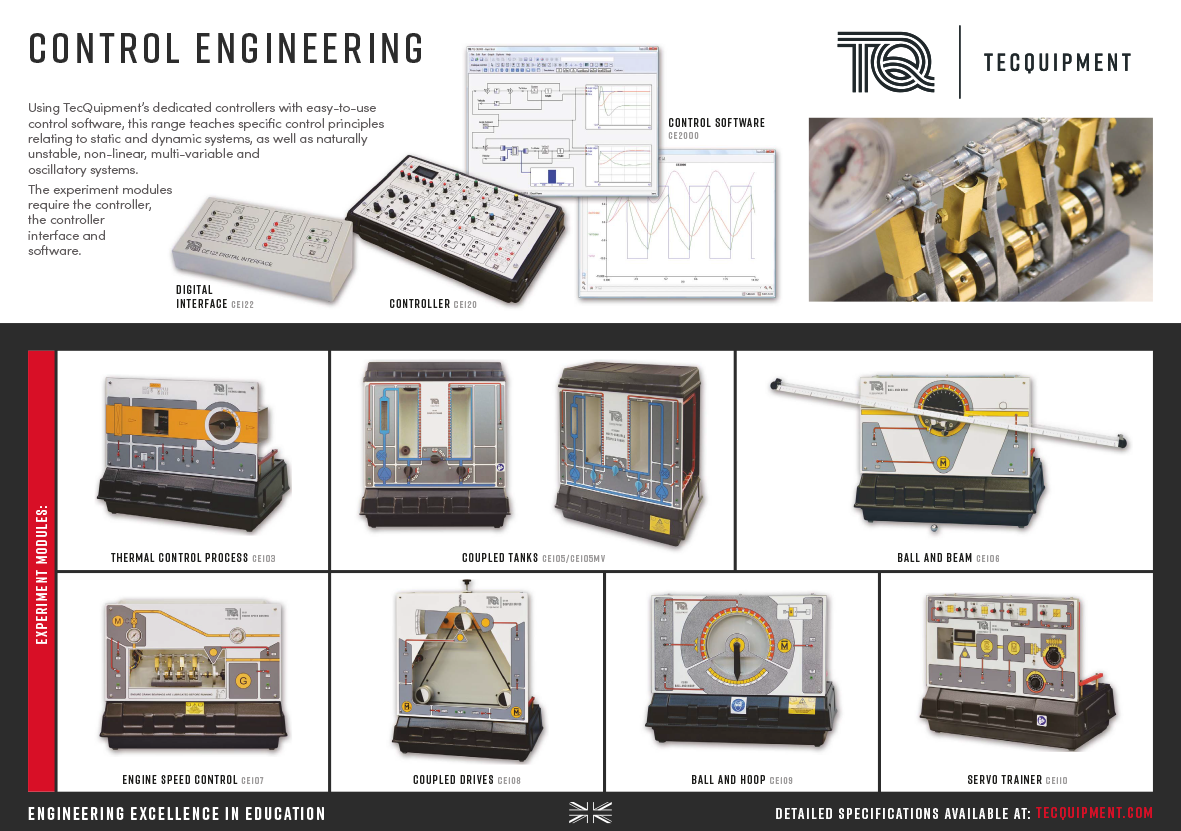
A compact self-contained bench mounting apparatus designed to allow students at all academic levels to investigate basic and advanced principles of control including control of naturally unstable systems.



If you have any questions or you'd like to discuss a product, please call us.
+44 1159 722 611BALL AND BEAM APPARATUS
The Ball and Beam Apparatus shows the control problems of unstable systems, for example a rocket or missile during launch, which needs active control to prevent the missile going unstable and toppling over.
The apparatus has a steel ball which is free to roll on two parallel tensioned wires. The wires are on a beam that pivots at its centre. A servo motor controls the beam angle and sensors measure the beam angle and ball position. The basic control problem is to vary the beam angle to control the ball position. The system is a double integrator, so it is naturally unstable. It needs active feedback control using phase-advance methods.
Key features
- Self-contained, compact benchtop unit that mimics a real control problem in unstable systems, such as missile or rocket take-off
- Highly visual apparatus, with moving ball and front panel mimic diagram of the process so students can see what they are controlling
- All inputs and outputs buffered for connection to TecQuipment’s optional controllers or other suitable controllers
- For basic and advanced experiments with angle, velocity and position control
Essential Base Unit
- Controller (CE120) – A controller with analogue and digital controls and instruments
or - Digital Interface (CE122) – An interface which connects between most products in the Control Engineering range and a suitable computer (not included)
or - Other suitable controller with +/– 10 V inputs and outputs
Both the CE120 and the CE122 include TecQuipment’s CE2000 Control Software with editable, pre-made control experiments for use with the CE106.
{kind=link}
Learning outcomes
- Measurement of system dynamics by transient and closed-loop methods
- Design of analogue phase-advance compensators
- Design of state reconstructors to obtain estimates of ball velocity and position

Ancillary
WB1