
Experiment
CE107
ENGINE SPEED CONTROL APPARATUS
A compact self-contained bench mounting apparatus designed to allow students at all academic levels to investigate basic and advanced principles of control including control of non-linear systems and inner-loop feedback techniques.


If you have any questions or you'd like to discuss a product, please call us.
+44 1159 722 611ENGINE SPEED CONTROL APPARATUS
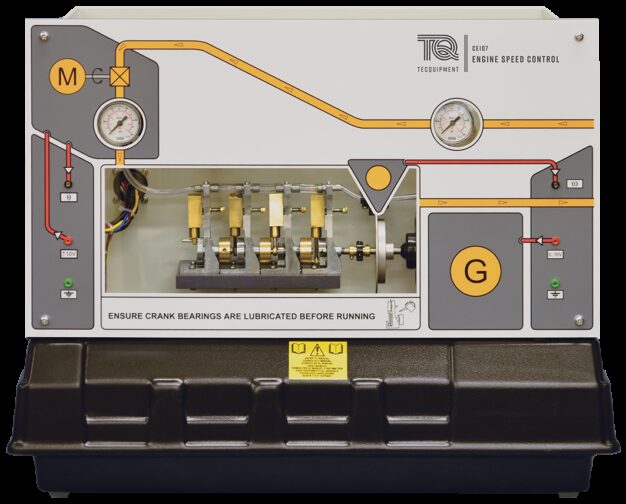
The CE107 Engine Speed Control Apparatus shows the problems of regulating the speed of rotating machines, especially problems with non-linear control systems. It is a scale-model engine, driven by compressed air (not supplied) for safety. The basic purpose is to adjust a motorised valve to regulate the engine speed under load. A d.c. generator connects to the engine output and loads the engine.
More advanced experiments show:
- Non-linearity compensation using dither signals
- Multiple loop and minor loop feedback
- System modelling from step response information
- P+I control and root locus methods
The engine dynamics are similar to those of a typical ignition compression engine coupled to a dynamometer-controlled test bed. It is an ideal physical model to help engineering students at all academic levels to gain invaluable practical experience.
Key features:
- Self-contained and compact benchtop unit to show problems of speed control in non-linear systems
- Small-scale, compressed air-powered piston engine to mimic a full-size engine with realistic results
- Front panel includes mimic diagram of the process so students can clearly see what they are controlling
- For basic and advanced experiments with speed control and non-linearity compensation
- All inputs and outputs buffered for connection to TecQuipment’s optional controllers or other suitable controllers
Essential Base Unit:
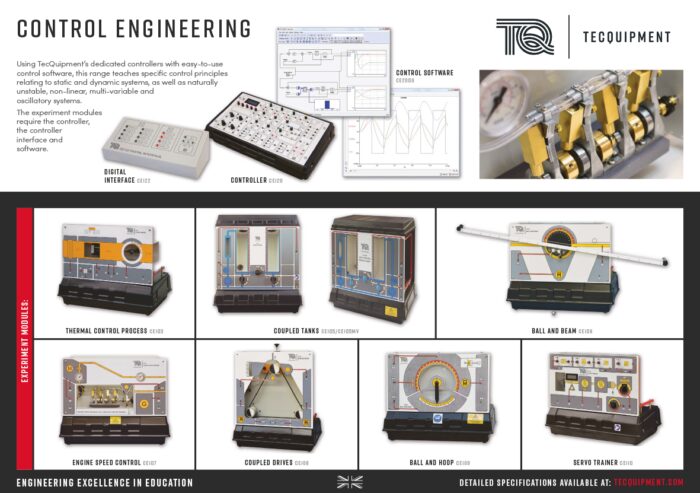
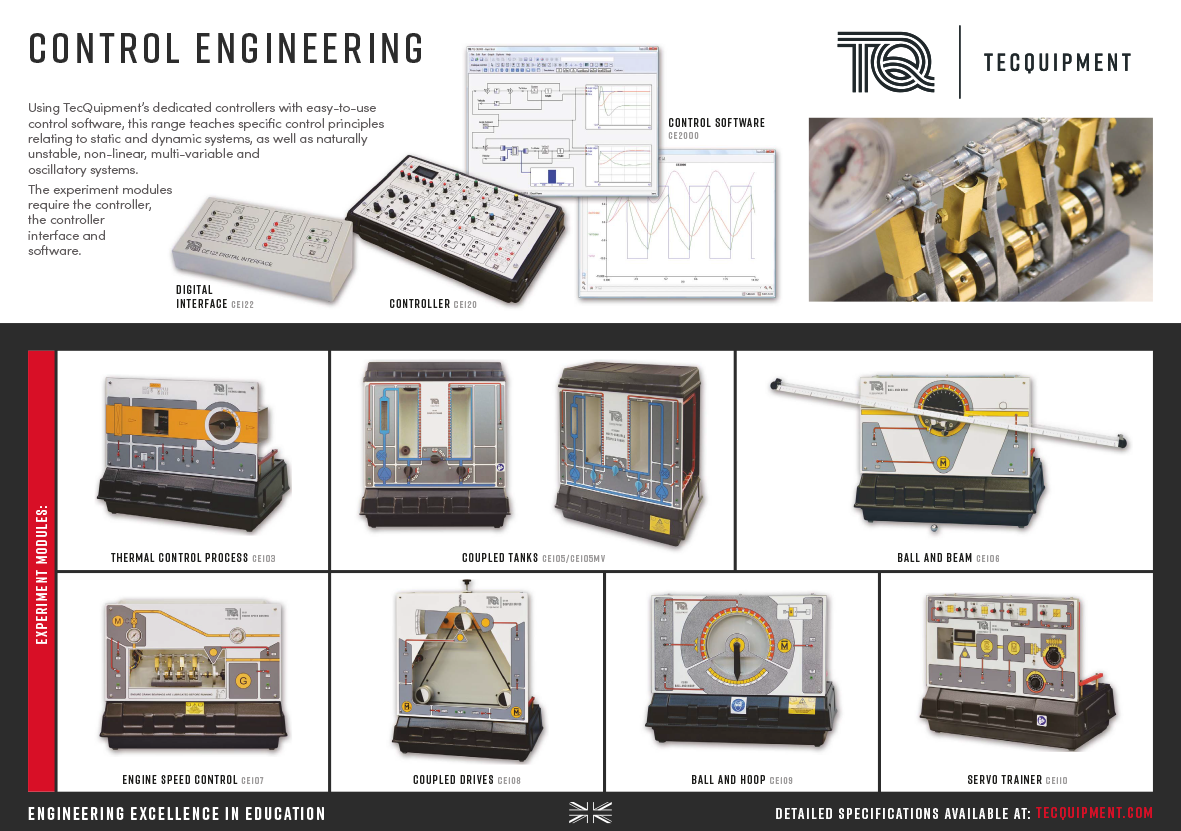
- Controller (CE120) – A controller with analogue and digital controls and instruments
Note: The CE120 includes TecQuipment’s CE2000 Control Software (see separate datasheet) with editable, premade control experiments for use with the CE107.
{kind=link}
Learning outcomes
- The use of dither signals in the compensation of system non-linearities
- The measurement of system dynamics from step response information
- Inner loop feedback compensation
- P+I controller design
The flexible design of the equipment allows the user to develop many other analysis and control exercises to suit their needs. It is good for extended or advanced control experiments, and is ideal for student project work.

Ancillary
ST1
STROBOSCOPE

Ancillary
WB1